 Uni-directional (cardioid) microphones are built with sound holes on the front and on the rear of the capsule.
Uni-directional (cardioid) microphones are built with sound holes on the front and on the rear of the capsule.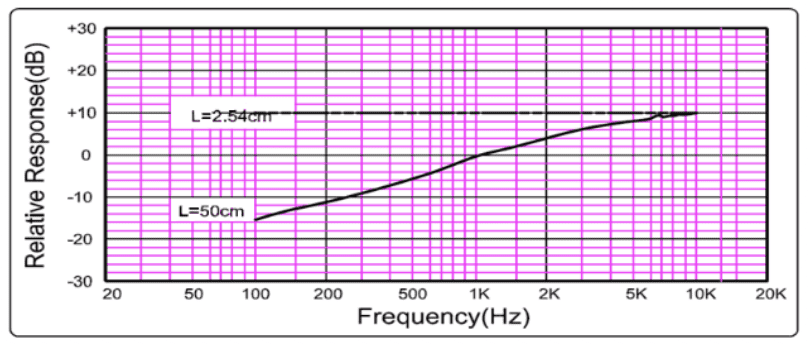 Noise-canceling (figure-8 or bipolar) microphones feature sound holes in the front and rear of the microphone capsule that capture sound in two directions while rejecting sound to the side of the microphone.
Noise-canceling (figure-8 or bipolar) microphones feature sound holes in the front and rear of the microphone capsule that capture sound in two directions while rejecting sound to the side of the microphone. 
Choosing the Right Microphone
Dynamic Microphone
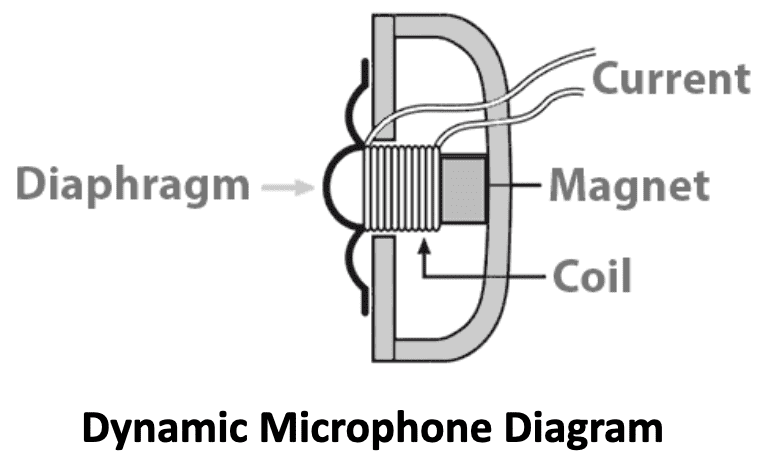 A dynamic microphone operates on the same basic electrical principles as a speaker, but in reverse. Sound waves strike the diaphragm, causing the attached voice coil to move through a magnetic gap creating current flow as the magnetic lines are broken.
A dynamic microphone operates on the same basic electrical principles as a speaker, but in reverse. Sound waves strike the diaphragm, causing the attached voice coil to move through a magnetic gap creating current flow as the magnetic lines are broken.
Dynamic microphones are typically more resilient than other common microphones (such as condenser microphones), due to their more rugged diaphragms and are most commonly used in high SPL environments such as in concert venues for sound reinforcement applications.
While more robust than condenser microphones, dynamic microphones are often much less sensitive
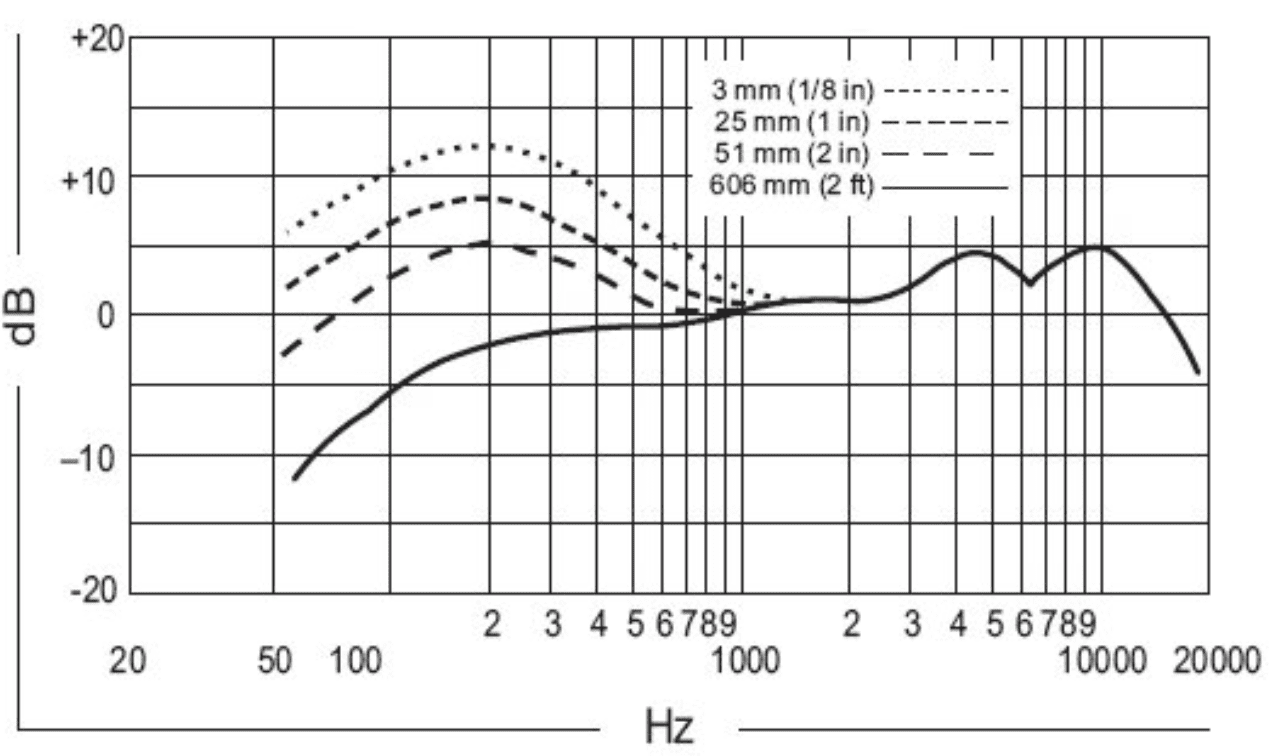
(producing less signal, or voltage with a given sound input) than condenser microphones, their low frequency performance is highly dependent on spacing from the acoustic source, and their inductance (due to the use of a high impedance coil) often reduces frequency response above 10 kHz.
Any speaker can be used as a dynamic microphone, with many commercial drive-thru call boxes using a speaker as both the audio output and audio . Typically, the most sensitive speakers (more SPL output with a given input) will make for the most sensitive dynamic microphone and the larger the diaphragm, the narrower the polar pattern.
 |
 |
|
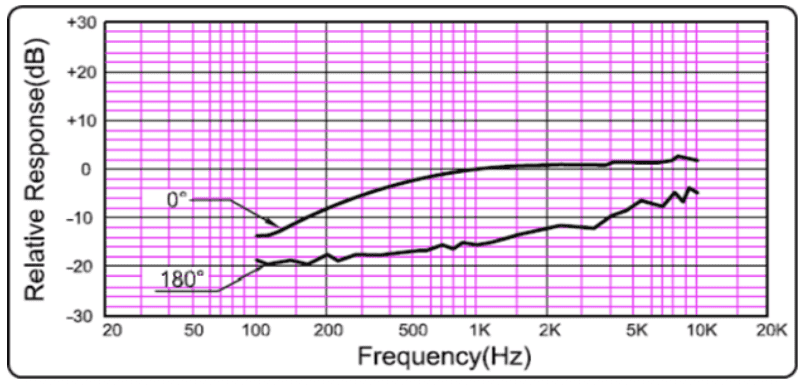
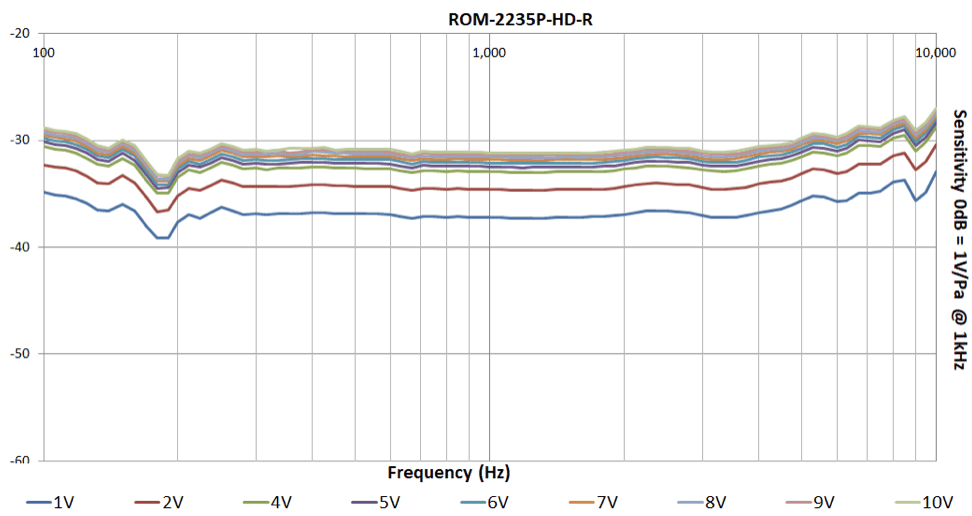
Sample Frequency Response of a Dynamic Microphone |
A Call Box Uses a Speaker as both a Microphone and a Speaker |
 Electret Condenser Microphone
Electret Condenser Microphone
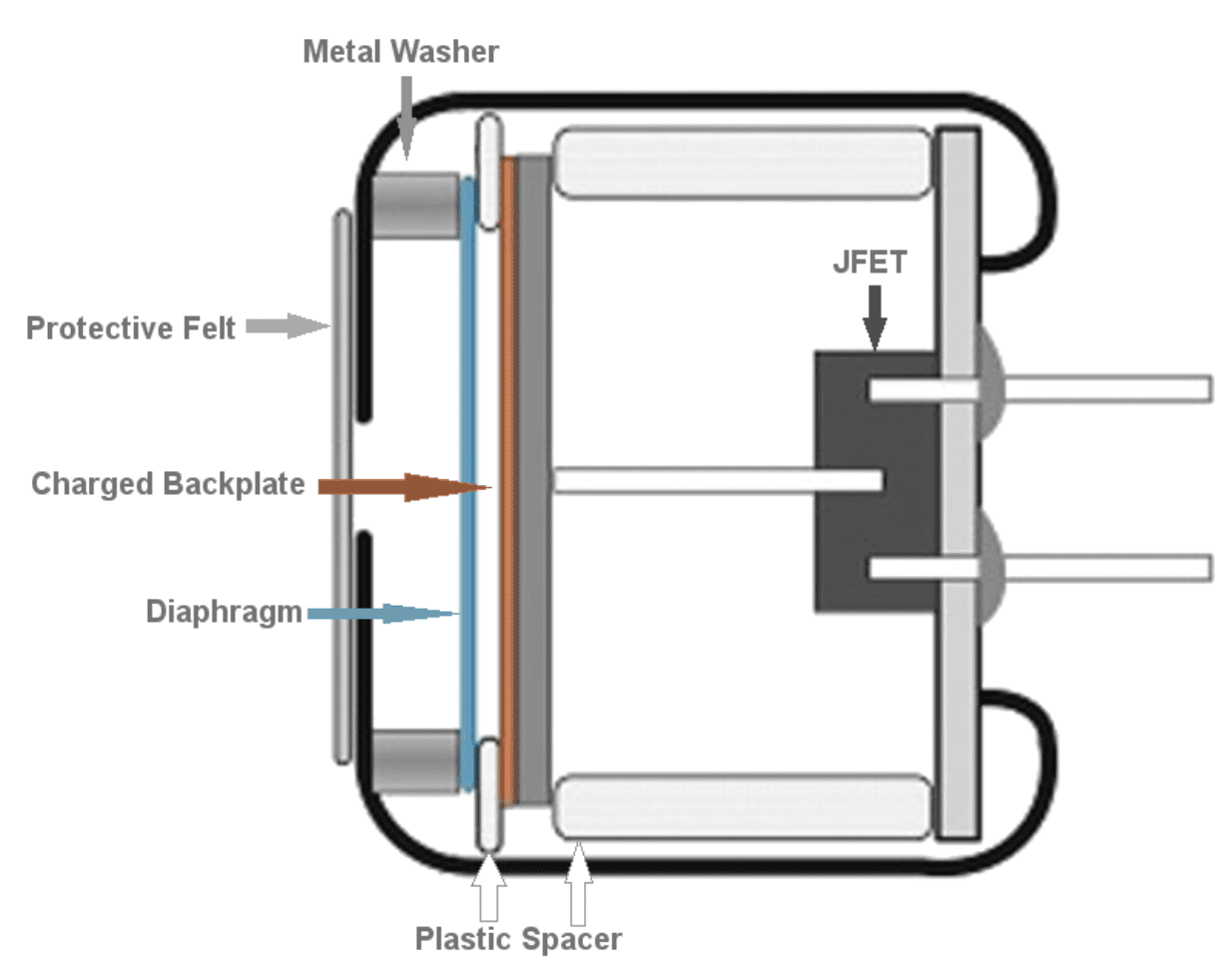
Electret condenser microphones (ECMs) operate on the principle that the diaphragm and backplate interact with each other when sound enters the microphone.
Either the diaphragm or backplate is electrically charged/polarized to create a magnetic field, the interaction within the field causes a change in capacitance, corresponding to the change in distance between the diaphragm and backplate.
A JFET within the microphone capsule acts as a pre-amplifier and changes the varying capacitance to varying voltage for use with another preamplifier or amplifier to boost the signal to a usable output.
The thin, lightweight diaphragm makes modern ECMs very sensitive when compared to dynamic microphones, with high-resolution capabilities and an ultra-wide frequency response. Most ECMs feature a housing design that is very small, making them easy to place within many different products.
Since the size of the internal diaphragm is quite small and thin, an ECM will typically have a lower Acoustic Overload Point (AOP) where the amount of input signal causes excessive distortion, when compared to a dynamic microphone.
ECMs can be made with many different types of polar patterns, to include omni-directional, uni-directional/cardioid, noise-canceling/bi-directional, and different variants of the cardioid type.
 |
 |
|
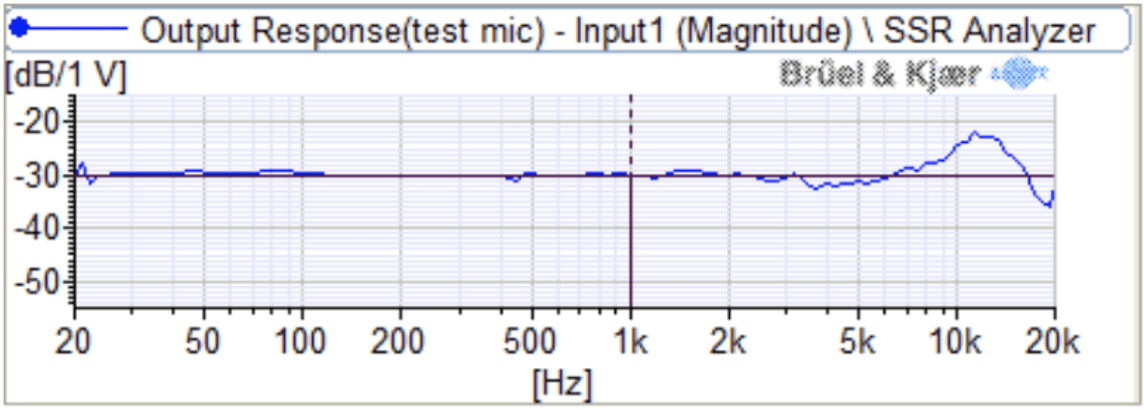
Frequency Response of the POM-2730L-HD-R ECM |
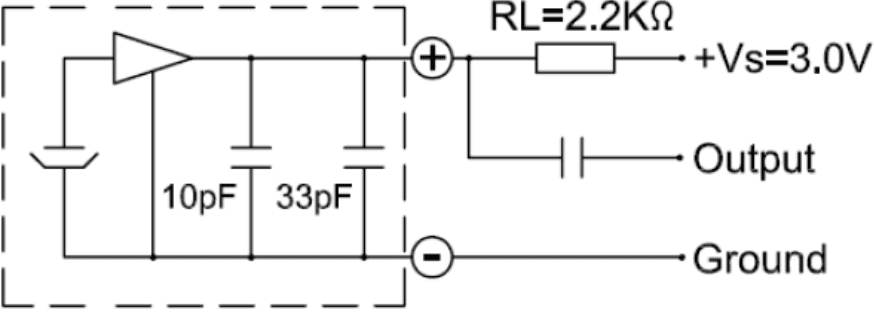
Typical ECM Drive Circuit (GSM buzz-blocking capacitors inside ECM) |
 MEMS Microphone
MEMS Microphone
Most MEMS microphones work off the same principles as ECM microphones, but the working parts are scaled-down in size using Micro Electrical-Mechanical System (MEMS) processes to etch a diaphragm out of a silicon wafer, which is then combined on a PCBA with an ASIC (Application Specific Integrated Circuit).
The moveable diaphragm works in unison with a fixed and electrically charged backplate. A change in distance between these two devices, when varying air pressure (or sound) enters through the acoustic port, creates a change in capacitance. This change in capacitance is turned into a varying voltage and is then pre-amplified by the ASIC before the signal is sent on its way to the output.
MEMS microphones typically have an omni-directional polar pattern, are built with either analog or digital ASICs, and are offered in top-firing as well as down-firing configurations. Current draw is typically low—200µA or less at full voltage for an analog version, and 800µA or less at full voltage for a digital version—with most digital MEMS microphones able to be powered-down into a Low Power Mode or Sleep Mode.
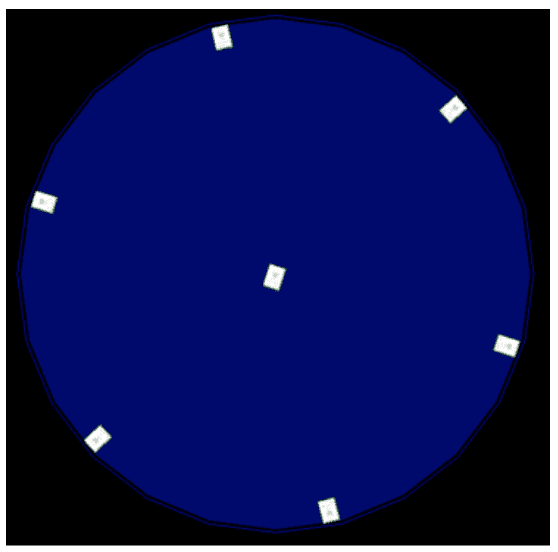
Digital MEMS microphones are sometimes used in arrays—multiple microphones splayed out in a specific pattern—for beam-forming applications. Beam-forming allows for a device to figure out which direction a sound came from due to the delay seen (from microphone to microphone) when monitoring all microphones at once, in the time domain, such as is used on the Amazon Echo™ devices.
Benefits of using a MEMS microphone include reduced power consumption, reduced size, reduced manufacturing costs with reflow soldering, as well as pick-and-place operations, and lower susceptibility to noise due to mechanical shock.
 |
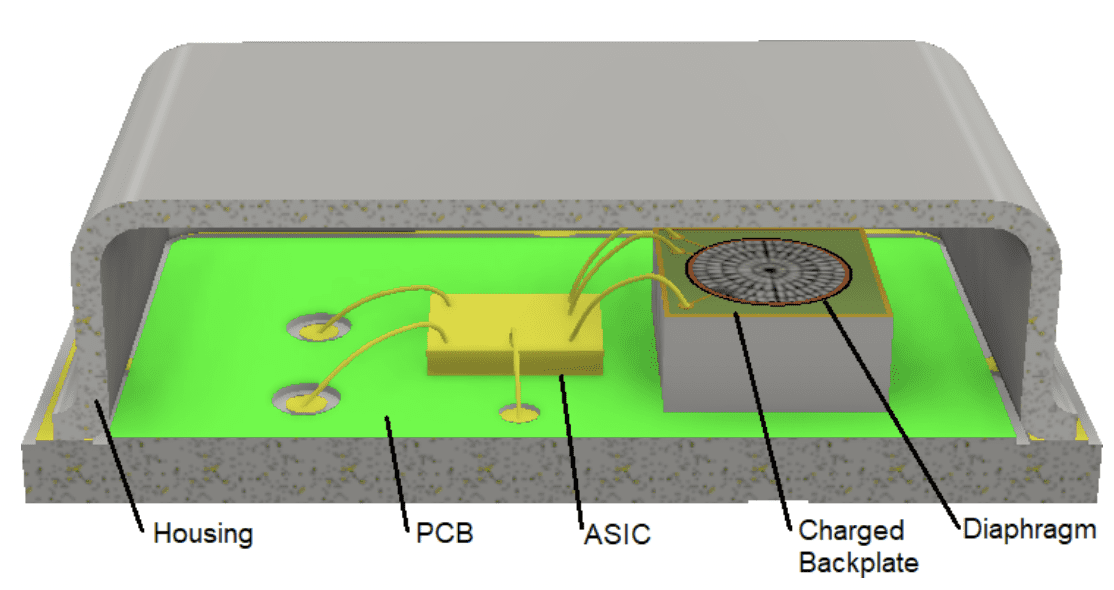 |
| MEMS Array | Diagram of a Down-Firing MEMS Microphone |
Microphone Sensitivity
Sensitivity is a measure of how much voltage a microphone will output, at 1 kHz, when placed at a specific distance from a 94 dB (1 pascal) acoustic source and when referencing that 0 dB is equal to 1VRMS of output, or 1VRMS/Pa.

If a microphone, spaced at 50cm from a speaker generating 94 dB of output, generates roughly 500mVRMS output, it would have a sensitivity of -6 dB. Most microphones have much lower output—between 3mVRMS and 100mVRMS—and a sensitivity between -20 dB and -50 dB.
Microphone Signal-to-Noise Ratio and Dynamic Range
 Microphones have a small amount of inherent noise that is self-generated, known as the Noise Floor.
Microphones have a small amount of inherent noise that is self-generated, known as the Noise Floor.
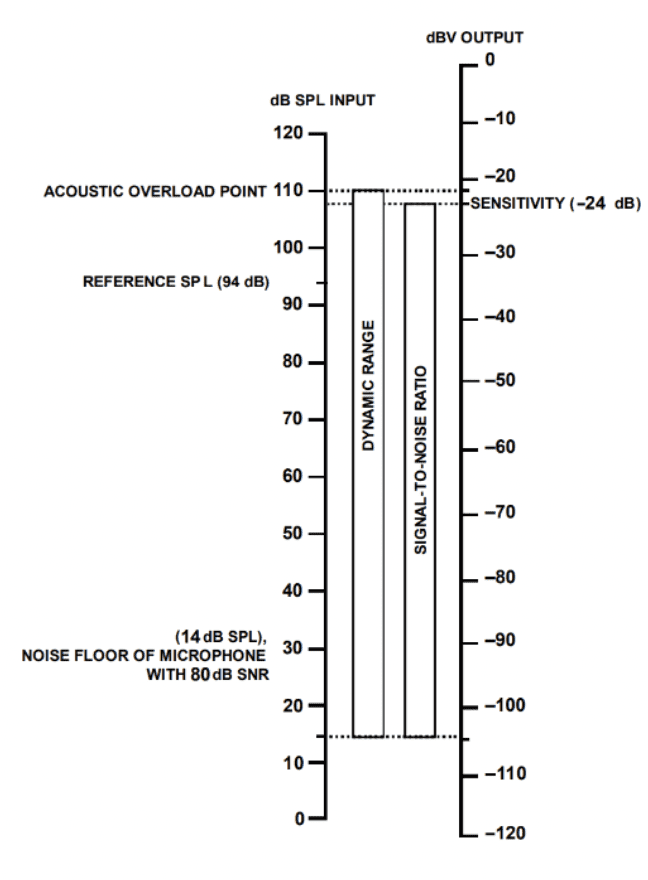
Microphones also have a maximum input SPL at which a certain amount of distortion occurs in the microphone output, known as the Acoustic Overload Point (or AOP) The difference between the rated sensitivity and the noise floor is the Signal-to-Noise ratio.
PUI Audio’s AOM-5024L-HD-R has a sensitivity of -24 dB with 3VDC input. The signal-to-noise ratio is 80 dB, making the noise level -104 dB and the noise floor 14 dB. The diagram on the right illustrates this.
To put that in perspective, if the total amount of output, for this microphone, is 63 mV/Pa, then the amount of noise in the signal is 0.0063 mV/Pa, or 0.01% of the total signal. The AOP is listed at 110 dB, making the total dynamic range 94 dB, at the rated voltage, and using the recommended bias resistor.
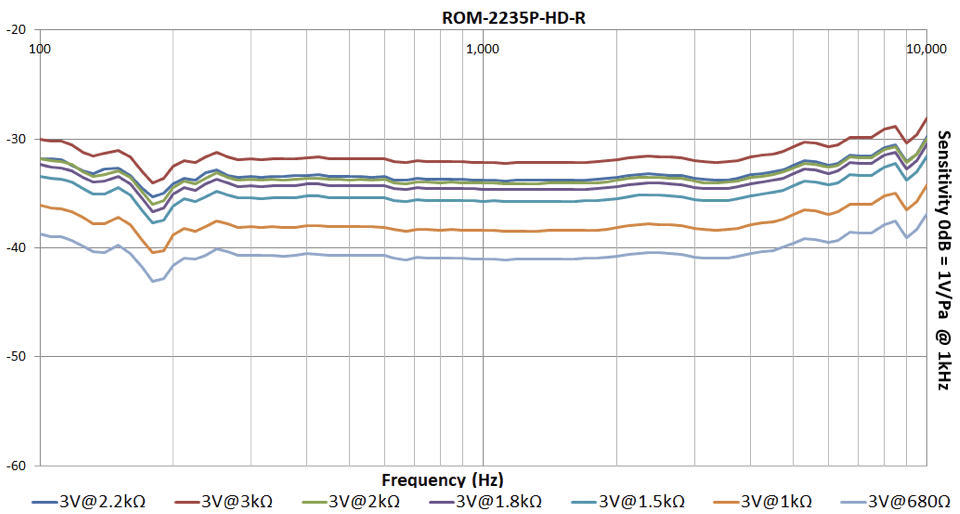
Increasing drive voltage, or selecting a bias resistor with higher resistance, increases sensitivity (as shown below) at the expense of raising the noise floor by the same amount and decreasing dynamic range.
 |
 |
Microphone Polar Patterns
Omni-Directional
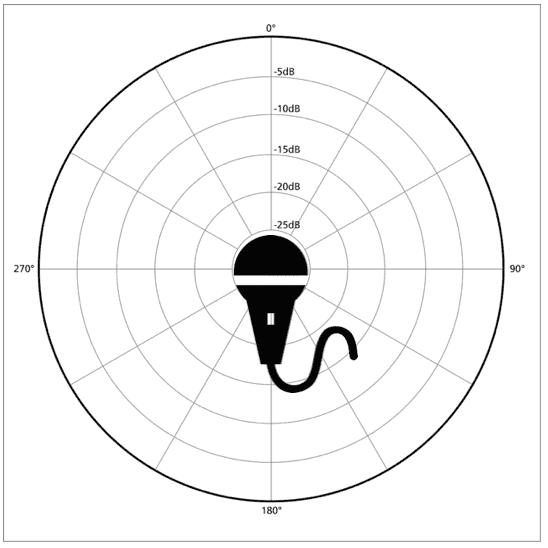 |
Omni-directional microphones capture sound equally well from all directions. Choose an omni-directional microphone if you intend to record all sounds within an environment, do not know from which direction the acoustic source will occur, or if a clean bass response is desired. Omni-directional microphones do not exhibit a proximity effect. Low frequency is captured equally well from any distance and does not dominate other frequencies.
|
Uni-Directional
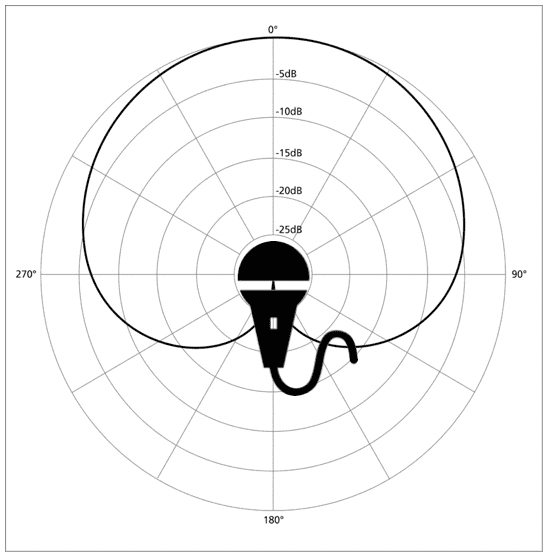 |
Inside the capsule, sound from the front takes precedence over sound captured from the rear. Sound from the rear is partially canceled-out, creating a response tailored for one direction. This microphone works well in automotive applications and in headsets. |
Noise Canceling
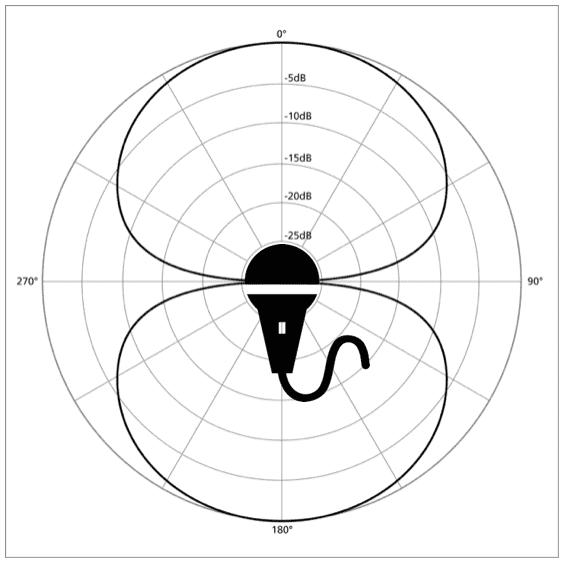 |
This type of microphone may be used to reject lower frequencies at a distance (such as wind noise) or to capture two different audio sources at once, such as for stereo recordings. |
Making the Right Choice
With all the different types of microphones available, choosing the right one (disregarding size constraints) might seem like a daunting task. Below are things to consider before selecting a microphone.
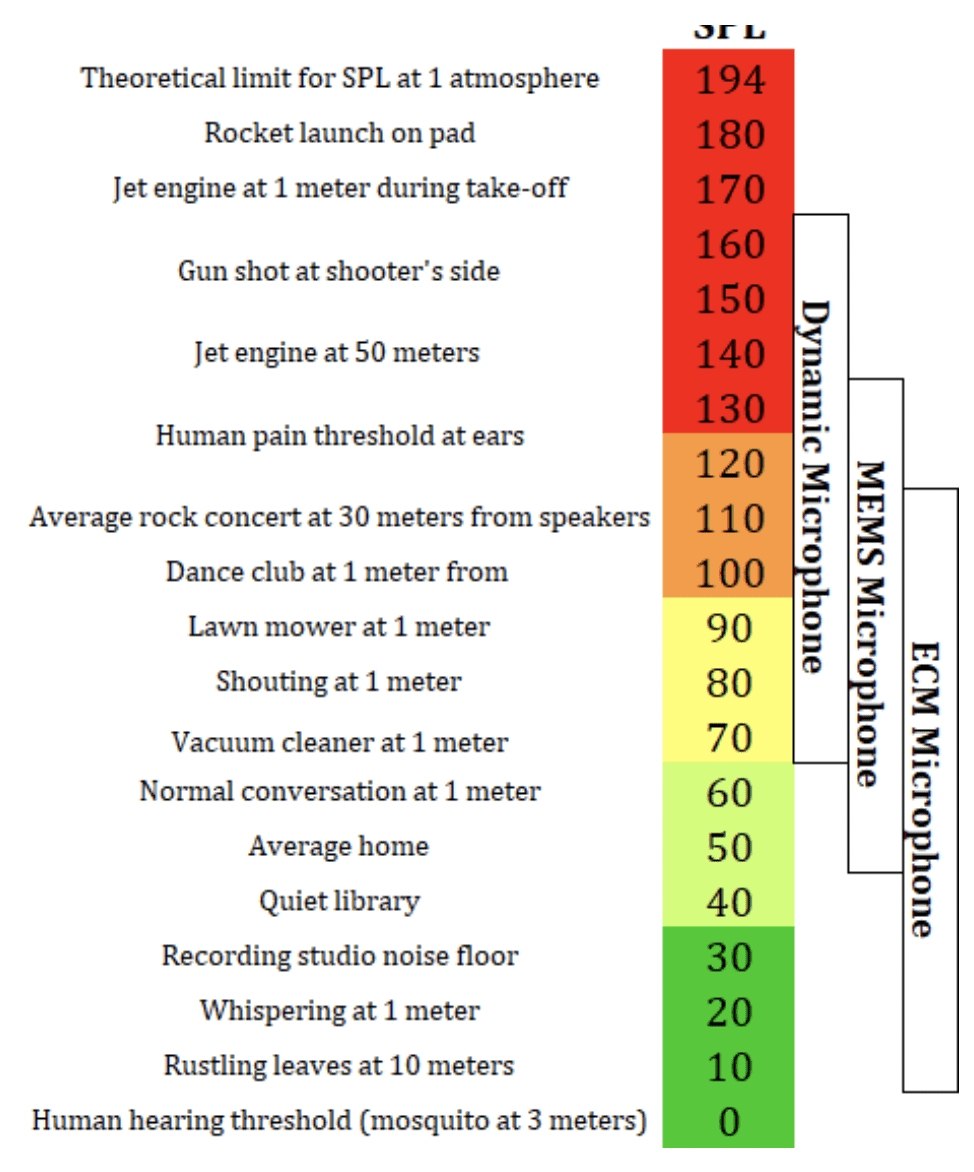
Ambient EnvironmentConsider where the microphone is going to be used. Test ambient noise using an SPL meter or SPL phone application. Even a cheap meter, or free app, is better than not knowing the design environment. A microphone with high sensitivity isn’t always the best microphone to use. In a quiet setting, where you intend to capture an above-average sound, choose a microphone that is less sensitive to avoid capturing background noise. If your environment has both loud and quiet acoustic sources, select a microphone with the most sensitivity and highest signal-to-noise ratio. |
 |
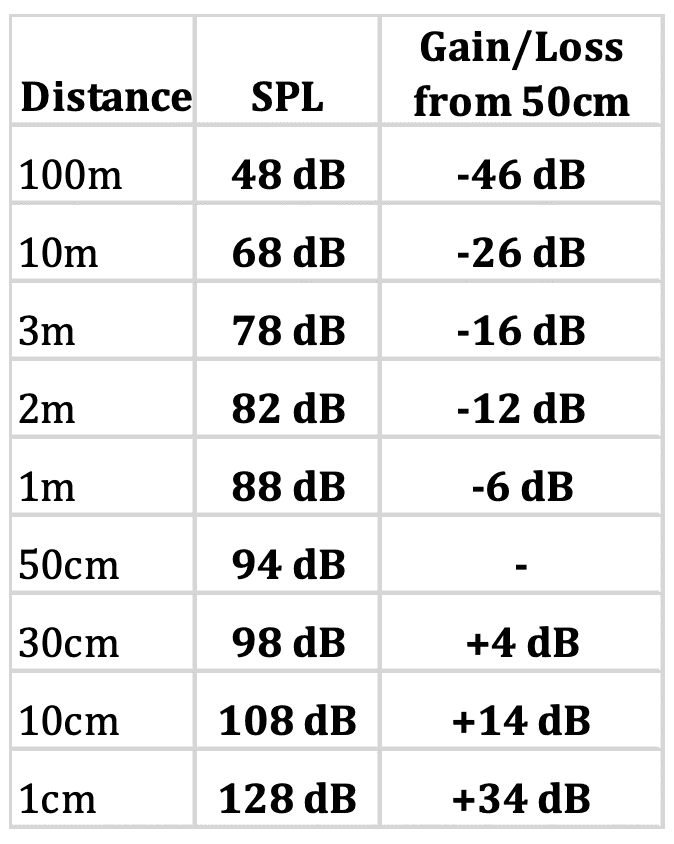
Distance Between Acoustic Source and MicrophoneSound pressure drops 6 dB for each doubling of distance between the acoustic source and the initial reference point. Most PUI Audio microphone specifications are listed with a reference distance of 50cm between a reference speaker and the microphone. Use the table to the right to convert the SPL at distance, between your acoustic source and the microphone, to ensure you are not overloading the diaphragm with sound pressure according to the microphone’s AOP. |
 |